
Table of Contents
Password of the Lecture Note: hhyang95
1. Basics of RecurDyn
1.1 Commonly Used Terms
RecurDyn Entities
•
Marker / Body / Joint / Force / Contact / Expression
•
Parametric Point (PP) / Parametric Value (PV) / Subsystem / Spline / GPIN & GPOUT
Coordinate
•
RecurDyn uses Cartesian coordinates.
•
Absolute Coordinate: Ground inertia marker
•
Local Coordinate: Body marker
Degree of Freedom (DOF)
•
The number of independent motions allowed to a body.
•
One general 3D-rigid-body has 6-DOF: 3 translational + 3 rotational.
1.2 Pre-Processor
RecurDyn GUI
•
System button, ribbon, toolbar, working window, database, message window, status bar
GUI Basic Handling
•
View: Translate (T), Rotate (R), Zoom (Mouse Wheel), Fit (F) → Customizable
•
Body Rendering Mode → Each Render
•
Working Plane Change: XY-Plane (Shift +X) / YZ-Plane (Shift + Y) / ZX-Plane (Shift + Z)
•
Icon Control
Basic Setting
•
General: Name / Shift when Pasting
•
Display: Background Color / Graphical Quality / Force Display
•
Gravity
1.3 Body
Rigid & Flexible
•
Rigid vs Full Flexible (FFlex) vs Reduced Flexible (RFlex)
Rigid Body
•
Edit Mode / Properties
Flexible: FFlex
•
Meshing: AutoMesh
•
Edit Mode / Properties
Flexible: RFlex
•
G-Manager / Properties
1.4 Joint
What is Joint Entity?
•
Definition
•
Connector: Base & Action Marker
Basic Joints
•
Types: Fixed, Revolute, Translational, Cylindrical, Spherical, Planar, Screw, Universal
•
Revolute Joint: Creation (Body, Body, Point, Direction) & Properties
•
Translational Joint: Creation (Body, Body, Point, Direction) & Properties
Joint Motion & Initial Conditions & Friction
•
Motion: Specify a forced motion on the joint.
•
Initial Conditions: Specify the initial position and velocity of the joint.
•
Friction: Sliding & Stiction Option / Static & Dynamic Friction Coefficient / Absolute Threshold Velocity
Special Joints
•
Cartesian Motion (CMotion): CMotion (G)
•
OnOff Joint
Primitive Joints
•
AtPoint, Inline, Inplane, Orientation, Parallel, Perpendicular, Distance
1.5 Force
What is Force Entity?
•
Definition
•
Connector: Base & Action Marker
Basic Forces
•
Types: Axial & Rot. Axial, Translation & Rotation, Screw / Spring & Rot. Spring, Bushing, Matrix
•
Axial: Creation (Body, Body, Point, Point) & Properties
•
Rot. Axial: Creation (Body, Body, Point, Direction / Joint) & Properties
•
Screw: Creation (Body, Body, Point, Point) & Properties
•
Bushing: Creation (Body, Body, Point, Direction) & Properties
Special Forces
•
Types: Beam, Plate, Tire
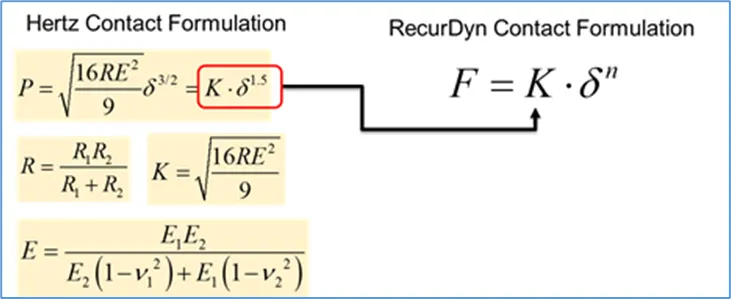
1.6 Contact
What is Contact Entity?
•
Hertz Contact Theory → Use penetration instead of deformation
•
Use the tessellation data (patch data) for contact detection
Basic Contacts
•
Type: Geo Surface, Solid, Primitive
•
Geo Surface: Creation (Solid, Solid / Surface, Surface)
•
Solid: Creation (Solid, Solid)
•
Selection of Base & Action
Contact Parameters
•
Stiffness Coefficient: It can be computed by ‘Hertz Contact Theory’.
•
Damping Coefficient: The value of ‘Stiffness Coefficient / 10000’ is commonly used.
•
Friction: Experimental value is used. Use default value for the ‘Threshold Velocity’.
•
Stiffness Exponent: The value of ‘1.5’ is recommended.
•
Maximum Penetration: Depending on simulation condition
•
Maximum Stepsize Factor: Depending on simulation condition
•
Node & Edge Contact
•
Advanced Setting: Smooth Option, CPM Option
•
Normal Direction
•
No. of Max Contact Points
•
Faceting Control Parameters: Surface Type, Bounding Buffer Length, Plane Tolerance Factor, Max. Facet Size Factor
1.7 Expression
What is Expression Entity?
•
Definition / Help
Basic Expression
•
Operators:
◦
Arithmetic Operators: +, -, *, /, **
◦
Logical Operators: ||, &&
◦
Relational Operators: <, <=, =, >, >=, <>
•
Simulation Constants: TIME, PI
•
Fortran Functions: ABS, SIN, COS, TAN, ASIN, ACOS, ATAN, ATAN2, DIM, SIGN, SQRT, MIN, MAX
•
Displacement / Velocity / Acceleration (Essential)
•
Generic Force / Specific Force (Optional)
•
Arithmetic IF: IF(f1:f2, f3, f4)
•
Interpolation: AKISPL, CUBSPL, LINSPL
•
General: BISTOP, IMPACT, STEP (Optional)
1.8 Parametric Value & Parametric Point & Subsystem
Parametric Value (PV)
•
Reusable Value
•
Used for:
1) Geometric Variables: Length, Thickness, Radius, etc.
2) Variables correlated with each other
3) Body Attitude: Euler Angle [rad]
4) Material Properties
Parametric Point (PP)
•
Reusable Point (Vector)
•
Used for:
1) Position of Body and Joint
2) Relative Position Using ‘Relative to’
3) Body Attitude: Coordinate Type
Subsystem
•
Independent component for re-usability and user convenience → Supports Copy & Paste
•
Independent Simulation, Data Base, PV, PP
Spline
•
Users can create or import spline data and utilize it for predefined motion, non-linear stiffness, etc.
•
RecurDyn supports the Akima spline curve fitting methods.
GPIN & GPOUT
•
GPIN (General Plant Input Entity): Return calculated values from external control programs to be used in the RecurDyn model
•
GPOUT (General Plant Output Entity): Return calculated values from the RecurDyn model to be used in external programs
1.9 Simulation
Simulation Types
•
Dyn/Kin: Dynamic and kinematic analysis
•
Static: Find the equilibrium state of the system.
•
Pre: Calculate the degree of freedom of the system.
•
Eigen: Eigen Analysis
•
FRA: Frequency Response Analysis
•
Scenario: Perform simulations in the desired type and order.
•
DOE: Design of Experiment -> Parametric study through batch simulation
Simulation Setting
•
Dyn/Kin General: End Time / Step / Plot Multiplier Step Factor / Output File Name / Static Analysis / Display Animation
•
Dyn/Kin Parameter: Maximum Time Step / Initial Time Step / Match Solving Stepsize with Report Step
•
Advanced Simulation Option: Limit of Angle in each Solving Step
1.10 Post-Processor
Animation
•
Import / Export / Reload Animation (*.rad File)
•
Animation Control
Camera Setting
•
Standard / Following / Riding / Moving / Multi
Plot
•
Results Plot / Export